Gibt es eine allgemeine Beschreibung (für Anfänger ![]() ), wie die Mecanum-Räder angesteuert werden und was die linear x, y, z bzw. angular x,y,z “bedeuten”, d.h. welche Auswirkungen sie auf die Bewegung haben?
), wie die Mecanum-Räder angesteuert werden und was die linear x, y, z bzw. angular x,y,z “bedeuten”, d.h. welche Auswirkungen sie auf die Bewegung haben?
Danke, Verena
Gibt es eine allgemeine Beschreibung (für Anfänger ![]() ), wie die Mecanum-Räder angesteuert werden und was die linear x, y, z bzw. angular x,y,z “bedeuten”, d.h. welche Auswirkungen sie auf die Bewegung haben?
), wie die Mecanum-Räder angesteuert werden und was die linear x, y, z bzw. angular x,y,z “bedeuten”, d.h. welche Auswirkungen sie auf die Bewegung haben?
Danke, Verena
Hey Verena,
Wie meinst du ansteuern, könnt ihr eure Motoren bereits mit Software bewegen lassen?
Und wenn ja, welche Software benutzt ihr?
Mecanum räder Bewegungsmuster:
Das sind die Bestandteile einer Twist Nachricht!
Die wird benutzt um dem Roboter zu sagen wohin er fahren soll.
Sie besteht aus zwei 3-D Vektoren, einen für linear, also lineare Bewegungen und einen für angular, also Drehbewegungen.
[Twist]─┬─>[Vector3 linear]─┬─>[float64 x]
│ ├─>[float64 y]
│ └─>[float64 z]
│
└─>[Vector3 angular]─┬─>[float64 x]
├─>[float64 y]
└─>[float64 z]
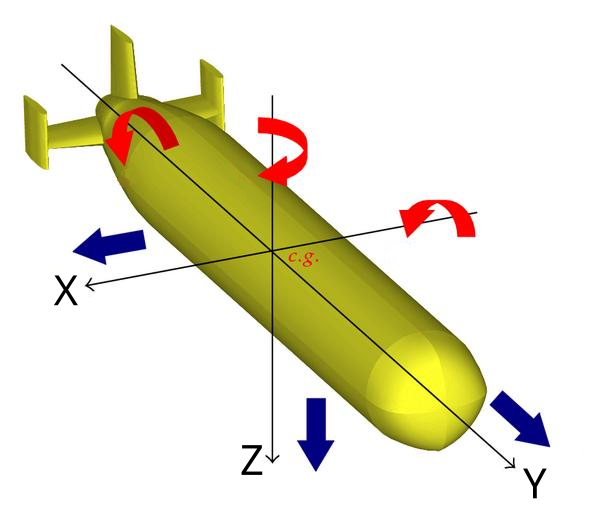
Du kannst es dir als ein Koordinatensystem vorstellen, wobei Vektoren (bzw. die Bewegungen eines Roboters) entlang der Achsen in ‘linear’, und drehungen um diese in ‘angular’ ausgedrückt werden:
Die Rad-Ansteuer-Software interpretiert diese Twist Nachricht, und bewegt die Räder entsprechend.
(daher ist es wichtig zu wissen welche ihr benutzt :P)
Man kann auch manuell Twist Nachrichten Senden!
# 1. Terminal - senden
ros2 topic pub /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
# 2. Terminal - empfangen/lesen
ros2 topic echo /cmd_vel
Zum weiterlesen:
Von jemand anderem erklärt
Weitere ROS geometrie-Nachrichten (oder hier)
Alle standard ROS Nachrichten
Sehr schön erklärt, vielen danke. Nur eine kleine Korrektur. Die X-Achse ist bei mobilen Robotern nach vorne und die Y-Achse nach links.
Grüße,
Christian